KUKA機器人系統通常由機械部分,控制系統,人機操作界面組成。
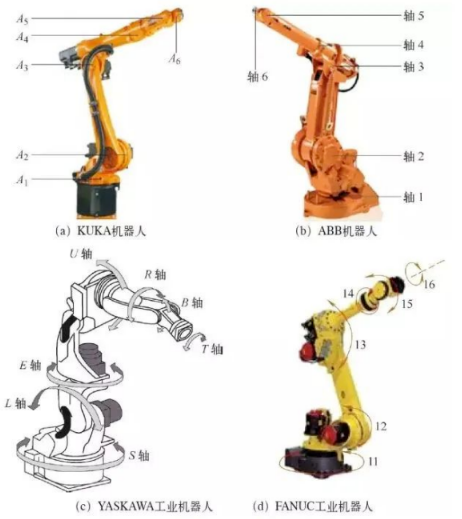
機器人本體通常有:四軸機器人、六軸機器人兩種機械本體。
控制系統:控制器、控制電機的伺服、用于外部的IO端子組成,集成在控制柜中,如圖2所示。
人機操作界面主要就是示教器,如圖3所示。
圖1 圖2 圖3
機器人各部位名稱形象分解:
各軸旋轉方向“正”與“負”之分,如下圖所示:
操作機器人需要通過示教器來操作
機器人附加軸介紹
附加軸可參與機器人的插補運動,分為機器人軸、外部軸和簡單軸。
變位機:專用焊接輔助設備適,用于回轉的工件焊接變位,以達到理想的加 工位置和焊接速度。此類附加軸通常設定為外部軸。
軌道軸:用于擴展機器人的運動空間,最多可擴展三個軸。此類附加軸通常設定為機器人軸。
下一期,重點學習示教器功能及應用
文章來源:工業機器人及PLC學習平臺
聲明:本文所使用視頻、圖片、文字如涉及作品版權問題 ,請第一時間告知,我們將根據您提供的證明材料確認版權并立即刪除文章!
 當前位置:
當前位置: 熱門課程
熱門課程